Кластеры лиц, силуэтов, транспортных средств
FindFace Multi поддерживает автоматическую кластеризацию объектов одного происхождения:
Изображения лиц, принадлежащие одному и тому же человеку, образуют кластер лиц.
Изображения силуэтов, принадлежащие одному и тому же человеку, образуют кластер силуэтов.
Изображения одного и того же транспортного средства образуют кластер транспортных средств.
Совокупные галереи кластеров лиц, силуэтов и транспортных средств доступны на вкладке Кластеры.
Примечание
Если для кластера лиц/силуэтов найдено совпадение с карточкой человека, он автоматически отобразится в данной карточке. По аналогии, кластер транспортных средств будет сохранен в соответствующей карточке транспортного средства.
Важно
По умолчанию кластеризация объектов отключена. Включите и настройте ее через файл конфигурации /opt/findface-multi/configs/findface-multi-legacy/findface-multi-legacy.py .
В этом разделе:
Алгоритмы кластеризации
FindFace Multi использует следующие алгоритмы кластеризации объектов:
Кластеризация в реальном времени. Данный алгоритм кластеризации обрабатывает эпизоды с целью выбора подходящих изображений объектов и кластеризует выбранные изображения. Он работает на лету после закрытия эпизода. Результаты кластеризации отображаются динамически на вкладке Кластеры и в соответствующей карточке.
Для кластеризации используются не все эпизоды. Если эпизод соответствует всем требованиям (см. подробности ниже), система формирует кластер следующим образом:
Выбирает событие наилучшего качества.
Создает новую сущность
cluster event(кластерное событие) в основной базе данных PostgreSQL. Сущность содержит метаданные выбранного события, вектор признаков объекта и миниатюру объекта, а также ссылку на родительский эпизод.Ищет похожий центроид объекта в галерее
cluster_eventsбазы данных векторов признаков Tarantool. Центроид объекта — это виртуальный вектор признаков, усредненный по всем объектам-близнецам, которые были обнаружены на данный момент (например, центроид лица — это вектор признаков, усредненный по всем изображениям лица одного и того же человека). Система обновляет похожий центроид, используя новое событие, если такой центроид найден. Иначе создается новый центроид.
Кластеризация по расписанию. Данный алгоритм кластеризации перерабатывает и пересматривает кластерные события, созданные во время кластеризации в реальном времени. Использование данного алгоритма улучшает качество кластерного центроида, поскольку в этом случае центроид усредняется по большему массиву накопленных векторов признаков. Результаты кластеризации по расписанию отображаются после каждой запланированной итерации на вкладке Кластеры и в соответствующей карточке.
Расписание задается в формате RRULE в параметре
CLUSTERS_CLUSTERIZATION_SCHEDULEфайла конфигурации/opt/findface-multi/configs/findface-multi-legacy/findface-multi-legacy.py. Предпочтительны ночные часы, так как запланированная кластеризация занимает много времени и ресурсов ЦП.Важно
Кластеризация по расписанию полностью перезаписывает содержимое галерей кластеров, включая идентификаторы. Вы можете закрепить определенные кластеры, включив настройки
CLUSTERS_AUTO_PIN_HEURISTICSиPIN_MATCHED_CLUSTERS(см. ниже).
Включение и настройка кластеризации
По умолчанию кластеризация отключена. Чтобы включить и настроить ее, выполните следующие действия:
Откройте файл конфигурации
/opt/findface-multi/configs/findface-multi-legacy/findface-multi-legacy.py. Найдите разделClusters configuration.sudo vi /opt/findface-multi/configs/findface-multi-legacy/findface-multi-legacy.py # -- Clusters configuration -- 'ENABLE_NIGHT_CLUSTERIZATION': False, 'ENABLE_REALTIME_CLUSTERIZATION': True, # rrule (recurrence rule) for scheduling "night" clusterization 'CLUSTERIZATION_SCHEDULE': 'RRULE:FREQ=DAILY;INTERVAL=1;WKST=MO;BYHOUR=0;BYMINUTE=0', # clusterize only selected objects types (for realtime and nightly clusterization) # available are: face, body, car 'CLUSTERIZE_OBJECT_TYPES': ['face'], # keep no more than N the best quality events in centroid (None to disable) 'CENTROID_MAX_SIZE': None, # save cluster events without emben and images (only keep thumbnail for the best event) 'LONG_LIVING_CLUSTER_EVENTS': False, # skip clusterization if unpinned cluster events count is greater than this value 'CLUSTERIZATION_MAX_CLUSTER_EVENTS': None, # create cluster only from cluster events in current case or only from cluster events without case 'ISOLATE_CASE_CLUSTERS': True, # cluster event to cluster matching confidence threshold 'FACE_CLUSTER_CONFIDENCE_THRESHOLD': 0.714, # model: [mango_320] 'BODY_CLUSTER_CONFIDENCE_THRESHOLD': 0.65, # model: [durga] # minimum required event quality for cluster creation 'FACE_CLUSTER_EVENT_MIN_QUALITY': 0.5, # model: [quality_fast.v1] 'BODY_CLUSTER_EVENT_MIN_QUALITY': 0.6, # model: [pedattr.quality.v0] 'CAR_CLUSTER_EVENT_MIN_QUALITY': 0.73, # model: [carattr.quality.v0] # discard cluster event if `max_centroids` similar centroids found with confidence greater than `confidence` 'FACE_CLUSTER_MAX_N_SIMILAR': {'enabled': False, 'max_centroids': 5, 'confidence': 0.714}, 'BODY_CLUSTER_MAX_N_SIMILAR': {'enabled': False, 'max_centroids': 5, 'confidence': 0.65}, # minimum required object size in pixels for cluster creation 'FACE_CLUSTER_EVENT_MIN_SIZE': 50, 'BODY_CLUSTER_EVENT_MIN_SIZE': 50, 'CAR_CLUSTER_EVENT_MIN_SIZE': 50, # minimum required number events in episode for cluster creation 'FACE_CLUSTER_EVENT_MIN_EPISODE_EVENTS': 1, 'BODY_CLUSTER_EVENT_MIN_EPISODE_EVENTS': 1, 'CAR_CLUSTER_EVENT_MIN_EPISODE_EVENTS': 1, # age feature threshold for cluster creation 'FACE_CLUSTER_EVENT_MIN_AGE_THRESHOLD': 16, .... # pinned clusters keep their id and events after reclusterization 'CLUSTERS_AUTO_PIN_HEURISTICS': { 'face': { # pin clusters with `value` minimum cluster events 'min_events': {'enabled': True, 'value': 10}, # cluster's centroid similarity confidence is less than 'max_centroid_similarity_threshold': {'enabled': True, 'value': 0.54}, # mango_320 # minimum average event's quality 'min_average_events_quality': {'enabled': True, 'value': 0.45}, }, 'body': {}, 'car': {}, }, # always pin clusters with matched events (not affected by heuristics above) 'PIN_MATCHED_CLUSTERS': False, ...
Включите кластеризацию в реальном времени, установив
ENABLE_REALTIME_CLUSTERIZATION: True.При необходимости включите кластеризацию по расписанию, установив
ENABLE_NIGHT_CLUSTERIZATION: True.Важно
Включать кластеризацию по расписанию имеет смысл только в том случае, если включена кластеризация в реальном времени. В противном случае система не сформирует ни одного нового кластера, поскольку только кластеризация в реальном времени является поставщиком уникальных кластерных событий.
... # -- Clusters configuration -- 'ENABLE_NIGHT_CLUSTERIZATION': True, 'ENABLE_REALTIME_CLUSTERIZATION': True, ...
При необходимости задайте рекуррентное правило (RRULE), задающее расписание плановой кластеризации. Если правило не задано, кластеризация автоматически начинается в 00:00 GMT.
Совет
См. калькулятор RRULE.
# rrule (recurrence rule) for scheduling clusters clusterization 'CLUSTERIZATION_SCHEDULE': 'RRULE:FREQ=DAILY;INTERVAL=1;WKST=MO;BYHOUR=0;BYMINUTE=0',
По умолчанию система формирует только кластеры лиц. Для того чтобы включить формирование кластеров силуэтов и транспортных средств, добавьте соответствующие типы объектов в следующую строку:
# available are: face, body, car 'CLUSTERIZE_OBJECT_TYPES': ['face','body','car'],
При необходимости измените минимальное количество событий в используемых для кластеризации эпизодах. По умолчанию данное количество равно 1. Сделайте это отдельно для каждого типа объекта.
# minimum required number events in episode for cluster creation 'FACE_CLUSTER_EVENT_MIN_EPISODE_EVENTS': 3, 'BODY_CLUSTER_EVENT_MIN_EPISODE_EVENTS': 3, 'CAR_CLUSTER_EVENT_MIN_EPISODE_EVENTS': 2,
При необходимости измените минимальное качество используемых для кластеризации изображений объектов. Сделайте это отдельно для каждого типа объекта.
Примечание
Поскольку данная настройка требует наличия высокого уровня знаний и опыта, мы настоятельно рекомендуем предварительно проконсультироваться с нашими техническими специалистами.
# minimum required event quality for cluster creation 'FACE_CLUSTER_EVENT_MIN_QUALITY': 0.5, # model: [quality_fast.v1] 'BODY_CLUSTER_EVENT_MIN_QUALITY': 0.6, # model: [pedattr.quality.v0] 'CAR_CLUSTER_EVENT_MIN_QUALITY': 0.73, # model: [carattr.quality.v0]
При необходимости измените порог уверенности алгоритма в совпадении объектов при сопоставлении кластерного события и кластера.
Предупреждение
Перед изменением данного параметра проконсультируйтесь с нашими специалистами по адресу support@ntechlab.com.
# cluster event to cluster matching confidence threshold 'FACE_CLUSTER_CONFIDENCE_THRESHOLD': 0.714, # model: [mango_320] 'BODY_CLUSTER_CONFIDENCE_THRESHOLD': 0.65, # model: [durga]
Кластеризация по расписанию полностью перезаписывает все созданные кластеры. Вы можете «закрепить» определенные кластеры, т. е. сохранить их и связанные кластерные события, включая идентификаторы, нетронутыми. Для этого используйте следующие настройки:
Примечание
Данные настройки являются независимыми. При необходимости используйте обе.
Примечание
Данные настройки не влияют на кластеризацию в реальном времени. Она продолжит создавать новые кластерные события для закрепленных кластеров.
CLUSTERS_AUTO_PIN_HEURISTICS: установитеTrueилиFalseдля следующих параметров и укажите соответствующие значения:Примечание
При необходимости сделайте это для каждого типа объекта.
min_events: закрепить кластер, когда количество связанных с ним кластерных событий превысит заданное минимальное значение.max_centroid_similarity_threshold: закрепить кластер, если сходство между его центроидом и центроидами других кластеров меньше заданного порога. Если кластер похож на некоторые другие кластеры, существует вероятность того, что данные кластеры принадлежат одному человеку/транспортному средству. В этом случае система не закрепит такой кластер, чтобы иметь возможность провести повторную кластеризацию. Напротив, непохожие кластеры будут закреплены.min_average_events_quality: закрепить кластер, если среднее качество ассоциированных кластерных событий больше заданного минимального значения.
# pinned clusters keep their id and events after reclusterization 'CLUSTERS_AUTO_PIN_HEURISTICS': { 'face': { # pin clusters with `value` minimum cluster events 'min_events': {'enabled': True, 'value': 10}, # cluster's centroid similarity confidence is less then 'max_centroid_similarity_threshold': {'enabled': True, 'value': 0.54}, # minimum average event's quality 'min_average_events_quality': {'enabled': True, 'value': 0.45}, }, 'body': {}, 'car': {}, },
Включите параметр
PIN_MATCHED_CLUSTERS, чтобы закрепить кластеры и связанные с ними кластерные события, для которых есть совпадения в картотеке.# always pin clusters with matched events (not affected by heuristics above) 'PIN_MATCHED_CLUSTERS': True,
При необходимости укажите максимальное количество кластерных событий в кластерах, которые являются «незакрепленными». По достижении данного количества кластеризация по расписанию будет автоматически отключена.
# skip clusterization if unpinned cluster events count is greater than this value 'CLUSTERIZATION_MAX_CLUSTER_EVENTS': None,
Перезапустите контейнеры FindFace Multi. В веб-интерфейсе FindFace Multi появится вкладка Кластеры.
cd /opt/findface-multi/ sudo docker-compose restart
Работа с галереями кластеров
Просмотр кластеров. Фильтры
Для того чтобы просмотреть галереи кластеров, перейдите на вкладку Кластеры.

При работе с галереями кластеров используйте следующие фильтры:
Примечание
Некоторые фильтры из приведенного ниже списка могут быть скрыты, в зависимости от активированной функциональности распознавания.
Объект: отобразить кластеры только для лиц, силуэтов или транспортных средств.
Совпадения: отобразить кластеры с совпадением/без совпадения или любые.
Списки наблюдения: отобразить только кластеры по определенному списку наблюдения.
Группы камер: отобразить только кластеры по определенной группе камер.
Камеры: отобразить только кластеры по определенной камере.
Имя карточки: отобразить только кластеры по определенной карточке.
Дата и время: отобразить только кластеры, сформированные в определенный период времени.
Первое событие кластера: отобразить только первое событие кластера, сформированное в определенный период времени.
Событие кластера: отобразить только события кластеров, сформированные в определенный период времени.
ID: отобразить кластер с определенным ID.
Специальные фильтры для кластеров лиц
Возраст: отобразить кластеры с людьми определенного возраста.
Борода: фильтровать кластеры по наличию бороды.
Эмоции: отобразить кластеры с заданными эмоциями.
Пол: отобразить кластеры с людьми заданного пола.
Очки: фильтровать кластеры по наличию очков на лице.
Витальность: фильтровать кластеры по liveness лица.
Медицинская маска: фильтровать кластеры по наличию медицинской маски.
Специальные фильтры для кластеров силуэтов
Пол по силуэту: отобразить кластеры с силуэтами людей заданного пола.
Возраст по силуэту: отобразить кластеры с силуэтами людей определенного возраста.
Головной убор: отобразить только кластеры с людьми в головном уборе заданного типа: шапка/шляпа/кепка, капюшон/платок, без головного убора.
Жилет: отобразить только кластеры с людьми, одетыми в жилет заданного цвета.
Жилет. Точность распознавания: отобразить только кластеры с людьми, одетыми в жилет с заданной точностью распознавания.
Каска: отображать только кластеры с людьми, одетыми в каску заданного цвета.
Каска. Точность распознавания: отображать только кластеры с людьми, одетыми в каску с заданной точностью распознавания.
Цвет верха одежды: отобразить только кластеры с людьми, одетыми в одежду заданного цвета (верх).
Цвет низа одежды: отобразить только кластеры с людьми, одетыми в одежду заданного цвета (низ).
Тип верха одежды: отобразить только те кластеры, в которых человек носит одежду верха заданного типа: куртка, пальто, безрукавка, толстовка, футболка, рубашка, платье.
Низ одежды: отобразить только те кластеры, в которых человек носит одежду низа заданного типа: брюки, юбка, шорты, неопределенный.
Верх одежды: отобразить только те кластеры, в которых человек носит одежду верха заданной обобщенной категории: с длинными рукавами, с короткими рукавами, без рукавов.
Специальные фильтры для кластеров транспортных средств
Марка: фильтровать кластеры по марке транспортного средства.
Модель: фильтровать кластеры по модели транспортного средства.
Тип кузова: отобразить кластеры с транспортными средствами заданного типа кузова.
Цвет кузова: отобразить кластеры с транспортного средства заданного цвета кузова.
Страна: отобразить кластеры с транспортными средствами, зарегистрированными в заданной стране.
Регистрационный номер: найти транспортное средство с заданным номером.
Регион: отобразить кластеры с транспортными средствами, зарегистрированными в заданном регионе.
Цвет номера: отобразить кластеры с заданным цветом регистрационного номера транспортного средства.
Спецтранспорт: отображать только кластеры с транспортными средствами, принадлежащими заданному типу: полиция, автомобили МЧС и пожарные машины, газоспасательные и аварийно-спасательные службы, скорая помощь, военная техника, коммунальная, строительная техника, прочие.
Категория ТС: отображать только кластеры с транспортными средствами, принадлежащими заданной категории: мотоцикл, скутер, легковой автомобиль с прицепом, грузовик, грузовик с прицепом, автобус, сочлененный автобус прочие.
Вес и размер кузова: отобразить кластеры с транспортными средствами заданного веса и размера кузова.
Примечание
Регион и цвет регистрационного знака определяются только для Объединенных Арабских Эмиратов (ОАЭ). Для других стран значения этих атрибутов будут выводиться как неизвестные в результатах распознавания.
Щелкните по нужному кластеру, чтобы просмотреть связанные с ним кластерные события. Вы будете перенаправлены на страницу События кластера.
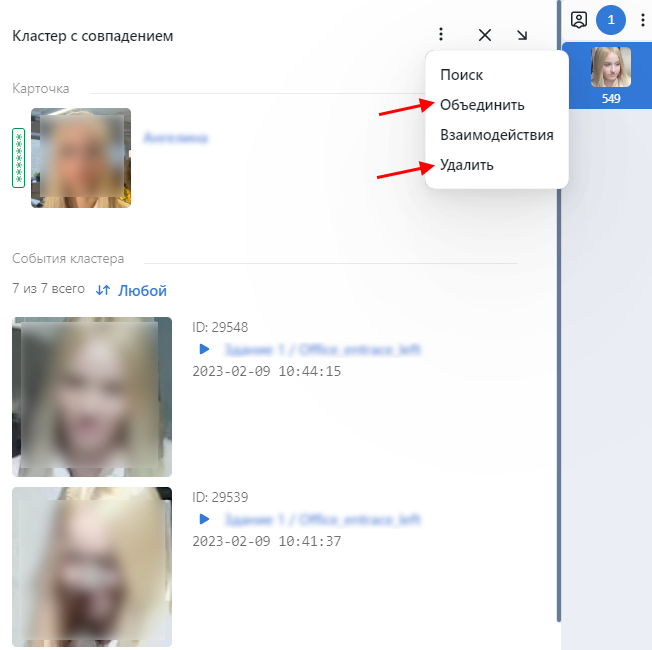
Объединение и удаление кластеров
Для того чтобы вручную объединить несколько кластеров, выберите их один за другим и нажмите Объединить.
Примечание
По умолчанию кластеры транспортных средств формируются только по номерному знаку. В этом случае невозможно объединить два кластера транспортных средств с разными номерными знаками.
Для того чтобы удалить кластер, выберите его и нажмите Удалить.
Статическая галерея кластеров
Иногда бывает необходимо завершить кластеризацию объектов в определенный момент времени, а затем оперировать статической галереей сформированных кластеров.
Для отображения вкладки Кластеры при отключенной кластеризации выполните следующие действия:
Откройте файл конфигурации
/opt/findface-multi/configs/findface-multi-legacy/findface-multi-legacy.py.sudo vi /opt/findface-multi/configs/findface-multi-legacy/findface-multi-legacy.py
В раздел
SERVICESвручную добавьте строку"clusters": True, как показано в примере ниже:... SERVICES = { "ffsecurity": { ... "clusters": True, } ...
Отключите процессы кластеризации в реальном времени и по расписанию.
... 'ENABLE_NIGHT_CLUSTERIZATION': False, 'ENABLE_REALTIME_CLUSTERIZATION': False,
Выполните перезапуск контейнеров FindFace Multi.
cd /opt/findface-multi/ sudo docker-compose restart
Ручная кластеризация
Для того чтобы вручную запустить процесс кластеризации, используйте утилиту run_clusterization.
Вы можете вызвать справку по опциям run_clusterization, выполнив следующую команду:
sudo docker exec -it findface-multi-findface-multi-legacy-1 /opt/findface-security/bin/python3 /tigre_prototype/manage.py run_clusterization --help
usage: manage.py run_clusterization [-h]
[--object-types OBJECT_TYPES [OBJECT_TYPES ...]]
[--force] [--configuration CONFIGURATION]
[--version] [-v {0,1,2,3}]
[--settings SETTINGS]
[--pythonpath PYTHONPATH] [--traceback]
[--no-color] [--force-color]
[--skip-checks]
optional arguments:
-h, --help show this help message and exit
--object-types OBJECT_TYPES [OBJECT_TYPES ...]
Clusterize selected object types. Uses
CLUSTERIZE_OBJECT_TYPES from config if not provided.
Allowed types: face, body, car
--force Force clusterization even if
CLUSTERIZATION_MAX_CLUSTER_EVENTS condition is met
--configuration CONFIGURATION
The name of the configuration class to load, e.g.
"Development". If this isn't provided, the
DJANGO_CONFIGURATION environment variable will be
used.
--version show program's version number and exit
-v {0,1,2,3}, --verbosity {0,1,2,3}
Verbosity level; 0=minimal output, 1=normal output,
2=verbose output, 3=very verbose output
--settings SETTINGS The Python path to a settings module, e.g.
"myproject.settings.main". If this isn't provided, the
DJANGO_SETTINGS_MODULE environment variable will be
used.
--pythonpath PYTHONPATH
A directory to add to the Python path, e.g.
"/home/djangoprojects/myproject".
--traceback Raise on CommandError exceptions
--no-color Don't colorize the command output.
--force-color Force colorization of the command output.
--skip-checks Skip system checks.
Данная утилита позволяет по отдельности запускать кластеризацию лиц, силуэтов и транспортных стредств, а также выполнять принудительную кластеризацию, если максимальное количество событий кластера превышает значение параметра CLUSTERIZATION_MAX_CLUSTER_EVENTS (см. Включение и настройка кластеризации). Например, чтобы принудительно запустить кластеризацию лиц, выполните следующую команду:
sudo docker exec -it findface-multi-findface-multi-legacy-1 /opt/findface-security/bin/python3 /tigre_prototype/manage.py run_clusterization --object-types face --force