Search Objects in System
FindFace Multi allows you to search for individuals throughout the entire system.
To find an individual, do the following:
Navigate to the Search tab.
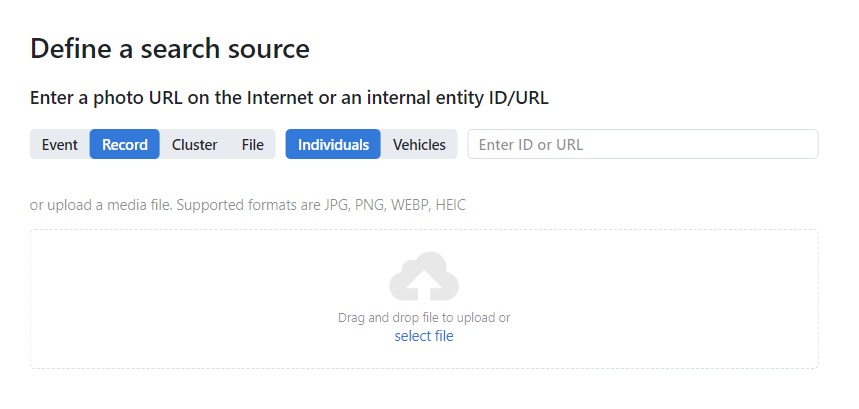
Specify an object to search for in one of the following ways:
by event’s URL or ID
by record’s URL or ID
by cluster’s URL or ID
by uploading a media file
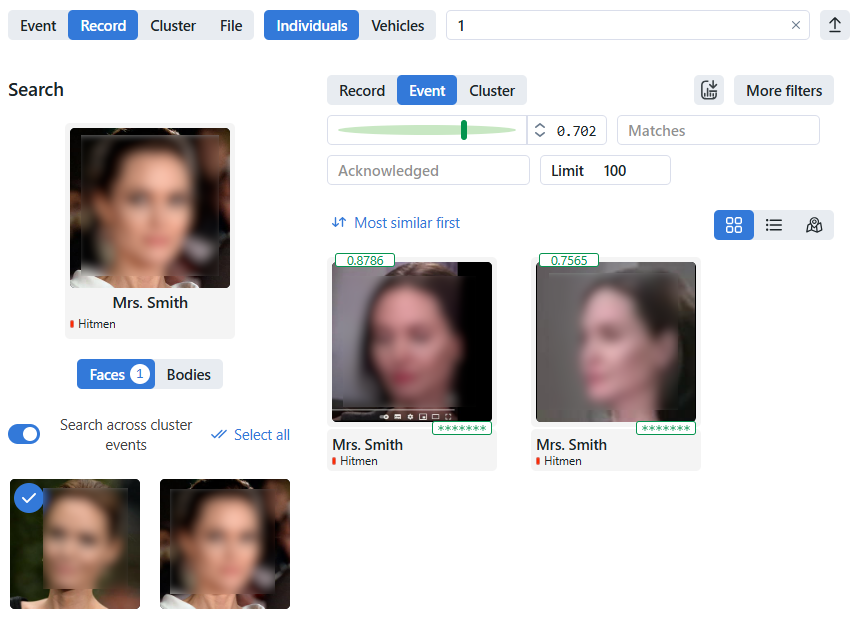
If you specified a record URL, select a photo from it. If there are multiple photos, you can select some or all of them. Click the Apply button. When you select several objects from the record index, the search range will narrow. The search results will only contain the objects similar to those on the selected photos and within the preset search threshold. The match probability of the desired object and the search result is displayed at the top of the thumbnail. The similarity between the matched event and the record is displayed at the bottom of the thumbnail.
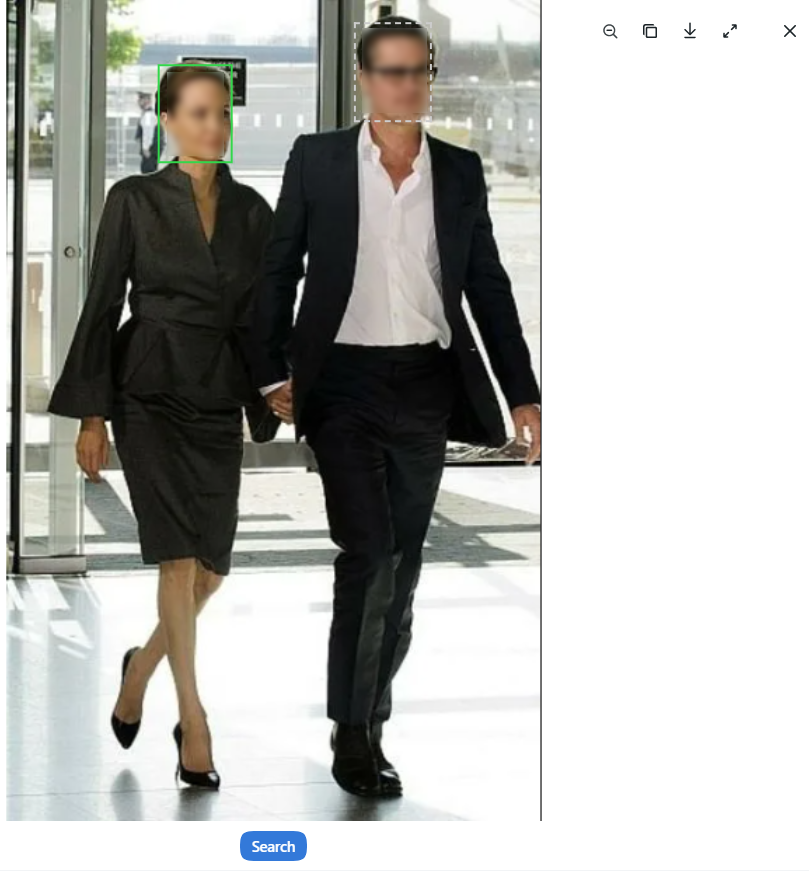
If you uploaded a photo, it will be displayed in the new window. If there are multiple objects in the image, select the one of your interest. Click Search.
By default, you’ll see the first 100 search results, sorted by similarity. You can change the result display limit in More filters -> Limits as well as narrow your search by specifying a watch list, similarity threshold, etc.
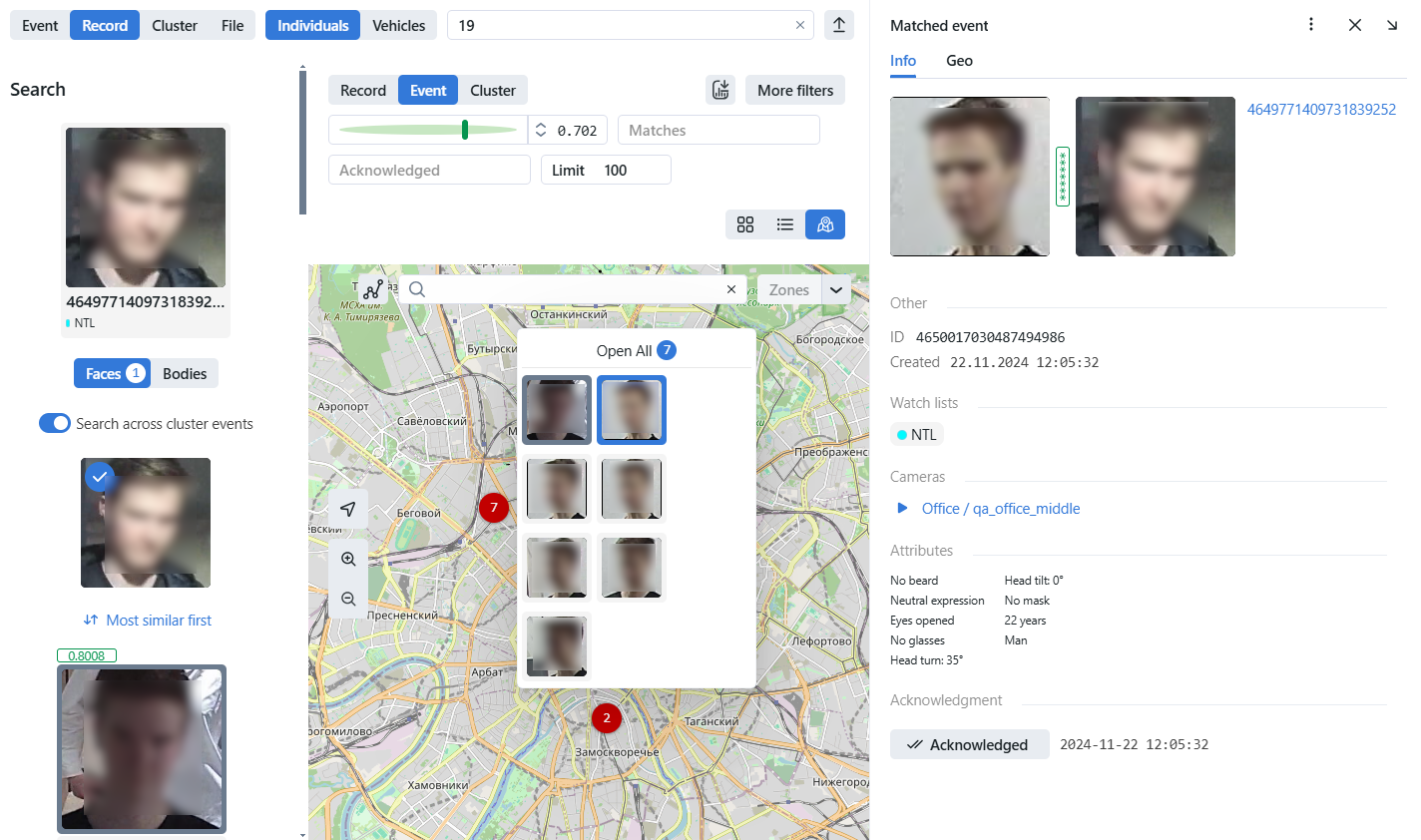
On the Event tab, events from cameras with a filled GEO field are displayed on the map if the map functionality is enabled. Click the button
 to switch to the map view. Events are displayed on the map as red circles with the number of events inside. At a distance, events are grouped into clusters, and upon approaching, the cluster is divided into separate objects.
to switch to the map view. Events are displayed on the map as red circles with the number of events inside. At a distance, events are grouped into clusters, and upon approaching, the cluster is divided into separate objects.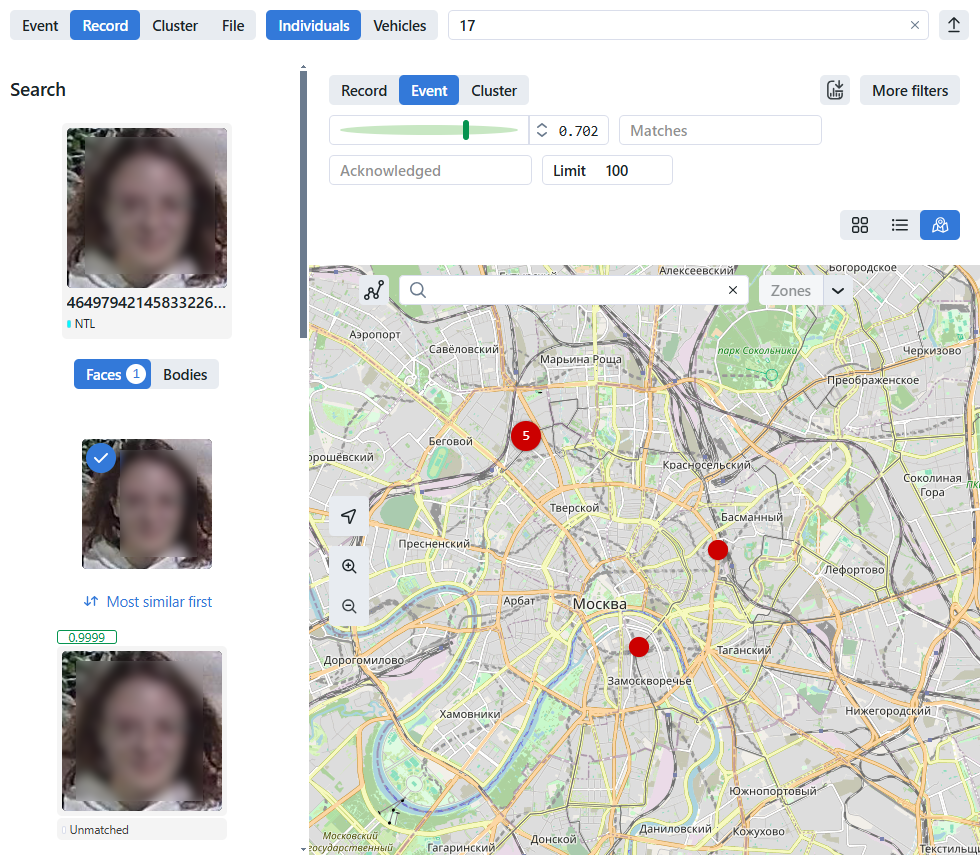
When you click a circle mark of events, a pop-up window is displayed with thumbnails of events grouped in a cluster. Click the thumbnail of the event to view the event ticket. This event will be highlighted in the left sidebar.
Map type
Select the desired map type by clicking
 :
:OSM
Stamen Toner
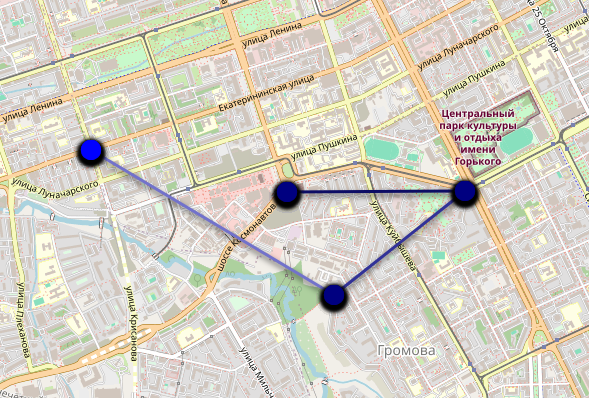
Object tracking
Click the
 button to display moving an object along track points connected by a line from the earliest to the latest event. In this mode, the track points do not display the number of events inside and have a specific color for each search object. The most recent events have a lighter indication of the track point and line, and the most recent events are displayed in a darker color.
button to display moving an object along track points connected by a line from the earliest to the latest event. In this mode, the track points do not display the number of events inside and have a specific color for each search object. The most recent events have a lighter indication of the track point and line, and the most recent events are displayed in a darker color.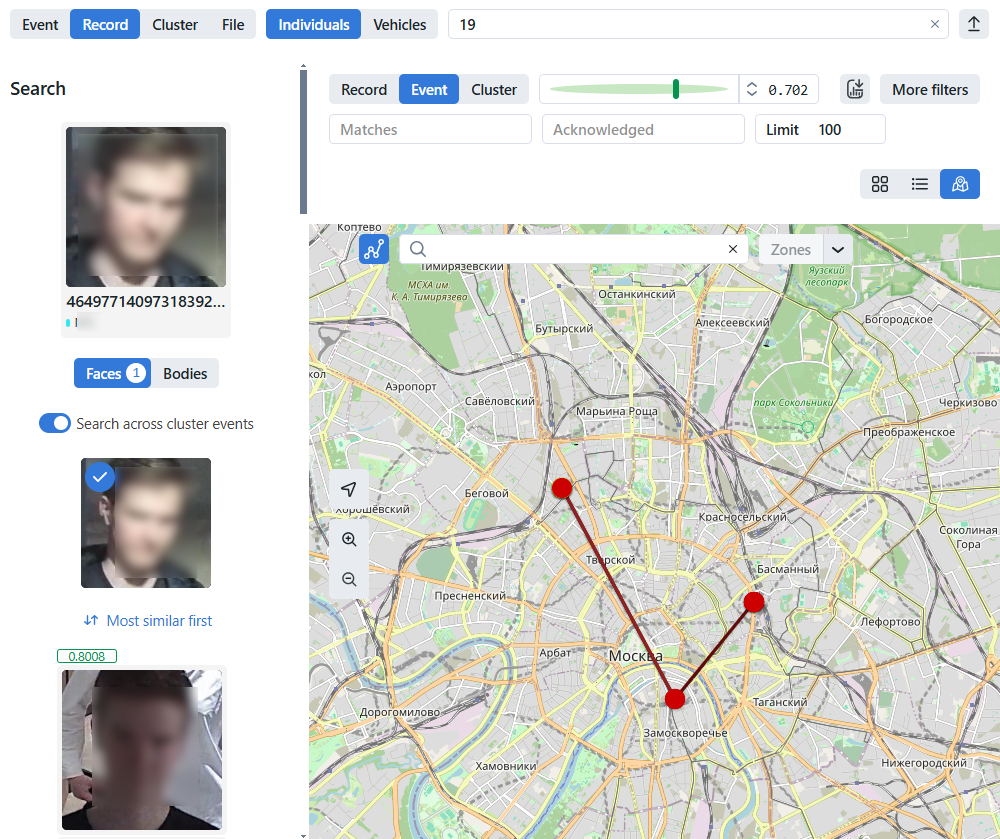
Real-time indication
If the desired object is detected by the camera in real-time, then the track point will pulse within 20 seconds.
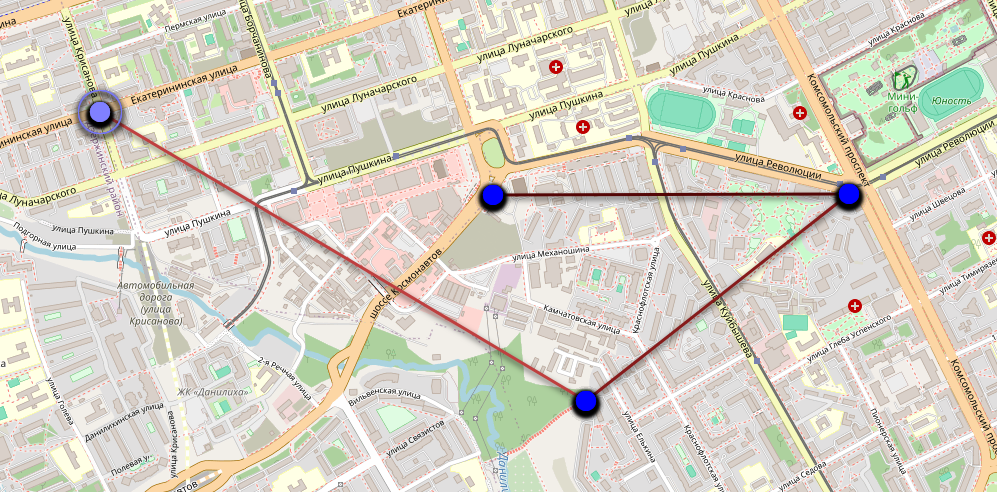
After that, the last track point stops pulsating and becomes a more saturated color, and the lines will have a pronounced gradient.
Zones
You can manually set an area on the map and save it using the Zones button. To do this, select the area you are interested in on the map at the desired scale. Click
 , enter a zone name and save it (for example: Moscow, MKAD, Office). Further, you can quickly navigate to the area you are interested in by selecting it from the drop-down list of zones.
, enter a zone name and save it (for example: Moscow, MKAD, Office). Further, you can quickly navigate to the area you are interested in by selecting it from the drop-down list of zones.To set the default map area and scale for the entire system, open the configuration file
/opt/findface-multi/configs/findface-multi-legacy/findface-multi-legacy.pyand modifydefault_zoomanddefault_centervalues in theMAP CONFIG EXAMPLEsection.# MAP CONFIG EXAMPLE "map": { "enabled": True, "default_zoom": 15, "default_center": {"lat": 55, "lng": 36}, ... },